
日本RLWRLD公司专注于物理AI机器人基础模型的研发,于5月26日展示了其最新机器人基础模型「RLDX-1(RealDex)」的人形机器人演示。
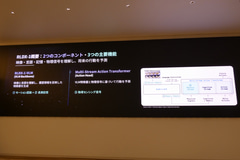
该公司获得了日本KDDI、ANA控股、三井化学、岛津制作所等企业的投资,致力于物理AI技术开发。RLDX-1采用了“Dexterity-First”设计理念,突破传统视觉-语言-动作(VLA)模型,仅依赖视觉和语言输入,进一步整合了力(扭矩)、触觉及作业记忆等多模态信息,力求实现接近人类的灵巧操作能力。
创始人兼CEO柳俊熙(リュ・ジュンヒ)表示,秉持“灵巧即智能”的信念,RLWRLD致力于开发能够通过交互和操作理解物理世界的真正AI,而不仅仅是理解语言。

公司首席科学家、韩国科学技术院(KAIST)AI研究生院教授申镇宇(シン・ジンウ)介绍,RLWRLD的模型在Dexterity基准测试中超越了现有主流模型如π0和GR00T。申教授指出,尽管AI在语言、图像和生成领域取得显著进展,但机器人在执行如倒咖啡、插拔电缆、小零件组装等手工操作任务时仍面临巨大挑战。

为解决这些难题,RLWRLD提出了将视觉、触觉、力觉和记忆同时融合的方案。申教授透露,RLDX-1在八项模拟基准测试中表现优异,已达到工业应用水平,但他强调RLDX-1只是起点,公司将持续深化研发。
随后,日本法人代表李勋(イ・フン)介绍了RLDX-1在全球多项基准测试中排名第一的成绩,及其通过扩展传统VLA模型,实现了细腻动作和未来行为预测能力。
针对制造和物流场景,RLWRLD设计了三阶段训练流程强化模型适应性。演示中,机器人能在传送带上拾取鼠标并放入箱内,或从水壶向杯中倒咖啡。放置鼠标时,机器人通过触觉感知遮挡视野的手部动作,倒咖啡时则感知双手的重量变化,展现出类人感知能力。

李勋还透露未来规划:2026年第四季度发布具备边缘情况视觉规划功能的RLDX-2,2027年第一季度推出支持多模态状态整合与预测的RLDX-3。

发布会上还介绍了KDDI在旗下便利店罗森及物流仓库的应用测试,以及Enactic开发的面向护理和家庭市场的开源机器人手臂平台“OpenArm”。
演示结束后,现场展示了两台不同规格机器人在传送带上对黑白物体进行分拣的实际操作。机器人头部装配视觉摄像头,识别物体形状和颜色,一台负责放置物体,另一台负责分拣。虽然偶有失误,但机器人能灵活应对物体位置变化,展现出良好的适应能力。



