日本JR东日本集团正在积极推动利用线内自主行驶型机器人进行轨道检查,并发布了相关进展报告。
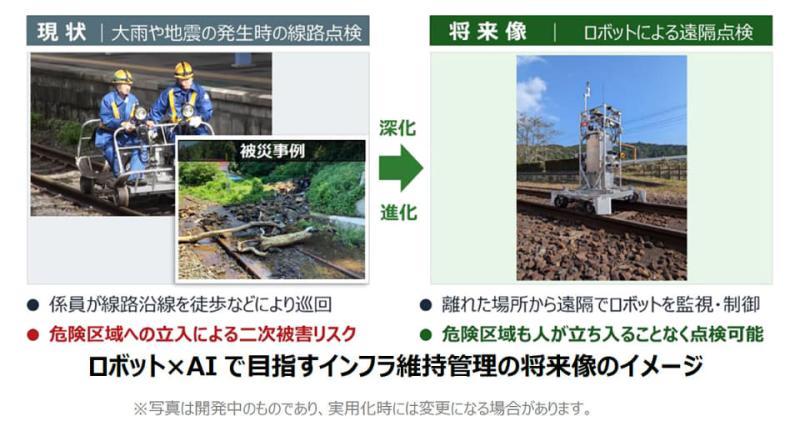
目前,轨道维护主要依赖工作人员沿轨道步行巡查,通过目视确认是否存在崩塌或土砂流入轨道等可能影响列车运行的障碍物。然而,这种巡查方式存在二次灾害风险,同时也面临熊类出没带来的安全隐患。
基于此,集团致力于建立一种远程控制机器人自主行驶至现场进行检查的新方法。目前,搭载多种传感器的机器人正在开发中,已在日本八高线等6条线路上完成试验验证。
机器人通过搭载的摄像头和传感器统一采集影像与数据,AI技术辅助检测轨道周边的障碍物并自动分析,识别可能影响列车运行的异常情况。最终是否存在影响则由工作人员进行确认判断。
该项目由在深度学习技术方面具有优势的日本Preferred Networks集团旗下专注机器人研发的Preferred Robotics公司共同开发。计划于今年10月底前完成机器人机体制造,11月起将在多条传统线路上开展运行测试。